 最近在纽约举行的一次论坛上,Google汽车项目CEO John Krafcik表示,自动驾驶汽车的到来是“一个过程,而不是会在某一个时间点一蹴而就的事情。
最近在纽约举行的一次论坛上,Google汽车项目CEO John Krafcik表示,自动驾驶汽车的到来是“一个过程,而不是会在某一个时间点一蹴而就的事情。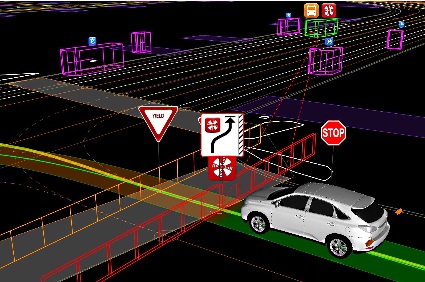 在这种情况下,Google汽车在“听到”救护车警笛时,会利用自身传感器“观察”周边区域,并在十字路口让路,直到救护车安全通过。
在这种情况下,Google汽车在“听到”救护车警笛时,会利用自身传感器“观察”周边区域,并在十字路口让路,直到救护车安全通过。 好莱坞为当地街区带来了非常特殊的环境,街上的孩子们经常穿着戏服,有时还带着大型物体。
好莱坞为当地街区带来了非常特殊的环境,街上的孩子们经常穿着戏服,有时还带着大型物体。
汽车生产商已经开始为传统乘用车增加高级驾驶员协助系统,逐渐构筑通往全自动汽车的道路,但这并不是唯一的路。好了,这样就不得不提一个问题:全自动驾驶汽车何时到来?将是什么样子?
Google在自动驾驶领域拥有多年经验,按照Google的预测,全自动驾驶汽车最早将在2020年成为现实。在最近由咨询公司J.D. Power、美国汽车经销商协会(NADA)及纽约车展联合举办的2016汽车论坛 (2016 Automotive Forum) 上,Google自动驾驶汽车项目CEO John Krafcik发表了演说,介绍Google自动驾驶汽车项目的进展。
很多人都梦想能拥有自己的全自动驾驶汽车——可以在开车的时候舒舒服服地靠在座椅上或者打个盹,用平板电脑读读新闻,甚至可以在上班的路上吃个早餐。虽然这种全自动驾驶汽车仍与现实有一定差距,但另一种自动驾驶汽车应用却可能很快成为现实,并有希望开创一个全新的市场,即适合残疾人、有视觉障碍者,以及无法自行开车的老年人的自动驾驶汽车。这样的愿景让NADA总裁Peter Welch激动不已,他也在论坛上发表了演讲。
短续航里程的交通出行
Krafcik称,自动驾驶汽车的到来是“一个过程,而不是会在某一个时间点一蹴而就的事情。”正如Welch的设想,在最初阶段,这些自动驾驶汽车将先为对续航里程需求不高的用户提供出行服务。随着技术不断发展,自动驾驶汽车的续航里程,以及可达到的最高速度均将有所提升,该潜在细分市场也将随之增长。
然而Krafcik表示,Google自动驾驶汽车的最高时速为25 mph(40 km/h),这种速度水平可以降低研发的难度,因为车速35 mph(56 kph)时所需的动能是25 mph时的两倍。
对于很多已经不能再继续开车的人而言,自动驾驶汽车带来的出行便利性,完全可以值回购买这辆车的费用。目前,Google为旗下的测试车辆规划了精确的行驶路线。因此,此类自动驾驶汽车也可以采取类似作法,为车主提供若干已经定义好的路线,并在可能的情况下继续添加新路线,以满足新的需求。
Google开发的自动驾驶汽车采用了电动动力系统,没有配备方向盘和油门、刹车踏板。这款车的最高时速仅为25mph,因此符合美国监管机构对智能“园区车(neighborhood car)”的定义,可行驶于区域相对较大的成人社区,其中很多均坐落在商场和医疗机构附近。居住在此类社区的车主可能会满足于这种缓慢但安全的个人交通方式,但基本上目前车辆仅适合天气好的时候使用。
Google还拥有一支雷克萨斯(Lexus)RX450h车队,公司拿掉了这些车的方向盘和油门、刹车踏板,并加装了自动驾驶系统。
预测性软件
Google的自动驾驶软件经过专门编写,具有预测功能,也就是说可以预测车辆周围移动对象的行为。Krafcik表示,软件通常可以预测一辆自行车是否马上要超车,或是一位行人是否要穿过街道。此时,车辆会减速至安全速度,远离自行车并为行人让路。但Krafcik解释说,道路环境可能非常复杂。举例而言,在好莱坞的街道上,孩子们会穿着戏服跑来跑去,这种情况是其他地方所不曾遇到的。此时,Google汽车立刻就能判断出,孩子的行为要比成人更加难以预测,特别是在穿着校服时。
Google在很早之前就为Google汽车配备了应对急救车辆的能力。Google自动汽车拥有一个“警笛”库,内含各种不同急救车辆的警笛声,比如救火车是长啸声,救护车的声音则更短更尖。Google汽车一旦“听”到警笛就会立刻停车,让急救车辆先通过十字路口。如果急救车辆需要从后方超车,Google汽车则将减速靠边停车。
Google称,自动汽车“将首先适用于部分人和部分道路环境,然后随着技术的不断发展,再逐渐将适用范围扩大至更多人。”
Krafcik笑称,Google汽车“完全就是建立在数据和测量的基础之上”,并指出公司工程师已经设计了成百上千项测试,另外还从2009年起累计了超过150万英里的真实道路测试里程。此外,Google每天还会进行300万英里的模拟。
Google项目的道路测试最早开始于加州101国道中的一段平面路段,那时车上还载有自愿参加测试的Google员工,扮演的乘客/驾驶员。
自给式软件
Krafcik在论坛期间表示,关于Google项目,值得一提的是目前所有车上软件均是属于自给自足式。“我们的自动车会直接利用车载处理器工作,并不需要云平台的帮助。”他表示,“我们并不依靠V2V(车-车)或V2X(车-基础设施)通信,因为这两种方式均有宕机的风险。”
全自动驾驶汽车的驾驶员可在遇到特殊情况时接管对汽车的控制,比如天气突变、高速封锁和高速限速等,而Google自动驾驶汽车的情况似乎要更加复杂。然而,由于使用范围相对有限,Google汽车似乎更容易实现自动驾驶。
目前,Google的两座自动驾驶车辆一直在加州山景城Google总部附近以及德克萨斯州奥斯丁市的街道上行驶,而且还在华盛顿州柯克兰市积累了雨中行驶的经验。此外,Krafcik表示,Google最近还开始了雪地测试,但他并未透露更多信息。
Google自动车顶部的圆饼型传感器一直被视为自动驾驶车辆的“雨刷”,但总体而言,天气对摄像头的影响比对激光雷达影响更大,因为激光雷达可以避免雨滴对视线的影响。现阶段,如果出现雨势过大、视野较差和/或路面湿滑的情况,Google汽车将减速行驶,甚至靠边停车,直至情况好转。
预测错误
自动驾驶汽车并不能完全避免车祸的发生,特别是在与人类驾驶员共用的道路环境中,即使这本是自动驾驶汽车支持者的愿望。今年2月份,一场发生在山景城的车祸受到了广泛报道:在等红灯时,一辆Google汽车靠向右侧车道准备右转。此时,车辆检测到下水道附近的沙袋挡住了自己的去路。因此,车辆停下先让多辆后车通过,而后慢慢打方向准备退出。在这个过程中,车辆“预测”一辆逐渐靠近的大巴会给自己让路,但大巴并没有停下来,一场轻微车祸就这样发生了。
Google的自动驾驶汽车项目并非孤军奋战,而是得到了一系列供应商的协助,包括博世(Bosch)、大陆(Continental)、孚利模(FRIMO)、LG电子(LGElectronics)、Prefix、RCO,以及Roush Industries等。
Krafcik表示,法律问题必须得到解决。据悉,美国加里福尼亚州要求在该州道路上行驶的汽车必须配备一名合格驾驶员。根据美国国家公路交通安全局(NHTSA)的诠释,该机构认为对于最高级别的自动车(4级或L4),机器人控制可被视为“合格驾驶员”。如果发生事故,相关经济责任由车主承担,但如果事故是由车辆缺陷引起的,则由厂商承担责任。
目前,一些非政府组织均对NHTSA的诠释提出了反对观点,其中包括位于加州的消费者监察人(Consumer Watchdog)。自动驾驶车辆需要相当高级别的“资质证明”。然而,随着低速自动驾驶汽车,也就是大家更常听到的“园区车”的不断优化,该潜在细分市场已经得到认可,可能最先形成规模。
作者:Paul Weissler
来源:SAE汽车工程杂志
翻译:SAE上海办公室
Google's Krafcik talks self-driving vehicle development
As automakers add advanced driver-assist systems to conventional passenger vehicles, they are developing one path to the fully autonomous vehicle—but not the only one. So, the inevitable question: When will fully self-driving cars arrive and what will they be like?
Google, with years of experience in this area, has predicted as early as 2020. Work underway was described by the project's CEO, John Krafcik, who spoke at the recent J.D. Power/NADA/NY Auto Show forum.
Many people envision getting into their fully-autonomous cars, sitting back and perhaps taking a nap, reading the latest news on a tablet or even eating breakfast during a drive to work. But there's an application that is likely to come sooner, and it promises to create a whole new market: a self-driving car for the handicapped, visually impaired, and elderly who no longer can drive safely. That was the vision that excited Peter Welch, President of NADA (National Automobile Dealers Association), who also spoke at the forum.
Short range mobility
Krafcik described readiness of self-driving cars as a "process, not a point in time." So at first, as Welch envisions, the cars might provide mobility for people who can be satisfied with a shorter range. As the process improves, the range and top speed should increase and the potential market should grow correspondingly.
However, Krafcik said Google's 25 mph (40 km/h) speed-limited vehicle is easier for the development process because kinetic energy at 35 mph (56 kph) is twice that at 25 mph.
For many people who are no longer able to drive, the mobility afforded by a self-driving car would justify its ownership. At this time Google precisely maps routes for its test cars, so a similar practice could give owners a list of trips to take, with new ones added as needed and possible.
The Google-developed cars are EVs without steering wheels or pedals. Because they're limited to 25 mph, they fit the description of smart "neighborhood cars." They could serve relatively large areas with adult communities, many of which are located close to shopping and medical facilities. Owners in such areas also could be satisfied with slow-but-safe personal transportation suited primarily for generally good-to-fair weather.
Google also has a fleet of Lexus RX450h's, modified for the self-driving system, and with steering wheel and pedals removed.
Predictive software
The Google software is written to be predictive, that is to know what everything movable around the car will do. According to Krafcik, it generally will predict a cyclist will ride by and a pedestrian will cross the street. So the car will slow to a safe speed and move away from the cyclist, then yield to the pedestrian. But road situations can be complex. On Halloween, for example, costumed children in the street were a new experience, he explained, and Google rightly decided children can be more unpredictable than adults, particularly when in costume.
The ability to deal with emergency vehicles on the road was addressed early by Google. It has a "library" of various sirens (a fire truck siren has a long wail, an ambulance a series of short shrills) and as soon as the car "hears" the siren it will stop to let it through an intersection. If the vehicle is coming from behind, it will slow down and pull over.
Google's official position is that "we will be ready for some people and road environments first, and as our technology improves, it will be available to more people."
Krafcik quipped that Google is "all about data and measurements," noting that company engineers have developed hundreds of tests, in addition to logging over 1.5 M miles in real-world road testing since 2009. The company each day performs 3 M miles of simulation.
The Google project began by using a flat section of CA Route 101, with volunteering employees as passenger/drivers.
Self-contained software
A noteworthy aspect of the Google project, Krafcik told the forum, is that presently all the software is self-contained. "Our autonomous cars use on-board processing power, nothing from the cloud," he said. "We are not relying on communication via V2V (vehicle to vehicle) or V2X (vehicle to infrastructure) because either can go down."
Such cars seem to involve more complexity than a full-range autonomous car with a capable driver available for special situations, such as sudden changes in weather, highway blockages and high road speeds. However, the opposite may be more likely to be true, because of the limits on its use.
The two-passenger Google self-driving cars have been rolling along streets in Mountain View, CA, near Google HQ, in Austin, TX, and, to increase experience with rain, in Kirkland, WA. In addition, Krafcik said, Google recently began testing in snow, but he provided no details.
The cars' dome-shaped sensors have what was described as the equivalent of a windscreen wiper, but in general the weather has more effect on cameras than lasers, as the latter can "see through" the raindrops. At this stage, if the rain is severe, visibility is poor and /or road conditions are slippery, the cars slow down and may even pull to the side of the road until conditions improve.
Prediction was wrong
No cars are totally accident free, even if that's the dream of self-driving car proponents, and certainly not with driver-operated vehicles also on the road. In a widely-reported accident last February in Mountain View, the Google car pulled into the right lane to prepare for a right turn on red. It detected sandbags near a storm drain blocking its path. So it stopped, let several cars pass by, then angled out to pull around. In doing so, it "predicted" a slow approaching bus would yield, but it didn't and a minor collision resulted.
Google is not working solo on its project. A long list of suppliers are assisting, including Bosch, Continental, FRIMO, LG Electronics, Prefix, RCO, and Roush Industries.
Legal issues must be sorted out, Krafcik maintained. California requires a licensed driver behind the wheel. NHTSA's interpretation has been that with what the agency considers to be the highest level of autonomy (Level 4, or "L4"), robotic controls can count as a driver, with financial responsibility assumed by the owner—or if an accident is caused by a defect, by the manufacturer.
There are NGOs (non-governmental organizations) such as California-basedConsumer Watchdog, that have objected to this. So the autonomous car will need a very high level of "proof." However, the potentially large market for a continuously improving lower-speed self-driving car, for a broadly-defined "neighborhood" area, is recognized, and so seems to be likely the first to come.
Author:Paul Weissler
Source: SAE Automotive Engineering Magazine
等级
打分
- 2分
- 4分
- 6分
- 8分
- 10分
平均分
- 作者:Paul Weissler
- 行业:汽车
- 主题:管理与产品开发噪声、振动与声振粗糙度零部件质量、可靠性与耐久性安全性运输系统车辆与性能人体工程学/人因工程学电气电子与航空电子测试与检验